Bilderkennung mit OpenCV
Voraussetzungen
- Roboter mit der aktuellen Software (siehe Bau des Roboters und Basisinstallation Software) zuzüglich Installation von OpenCV und Numpy.
- Python Programmierkenntnisse
- Einen weiteren Computer um auf den Roboter zuzugreifen. An diesem Computer sitzt du und programmierst den Roboter. Der Computer kann ein Raspberry Pi mit Monitor, Tastatur und Maus sein, oder ein Windows Laptop. Da der Roboter über WLAN kommuniziert, muss auch der weitere Computer über WLAN kommunizieren können.
- Wie du den Roboter an- und ausschaltest und dich mit dem VNC Viewer und mit ssh verbindest ist in Mit Roboter verbinden und Roboter ausschalten erklärt.
Aufgabe
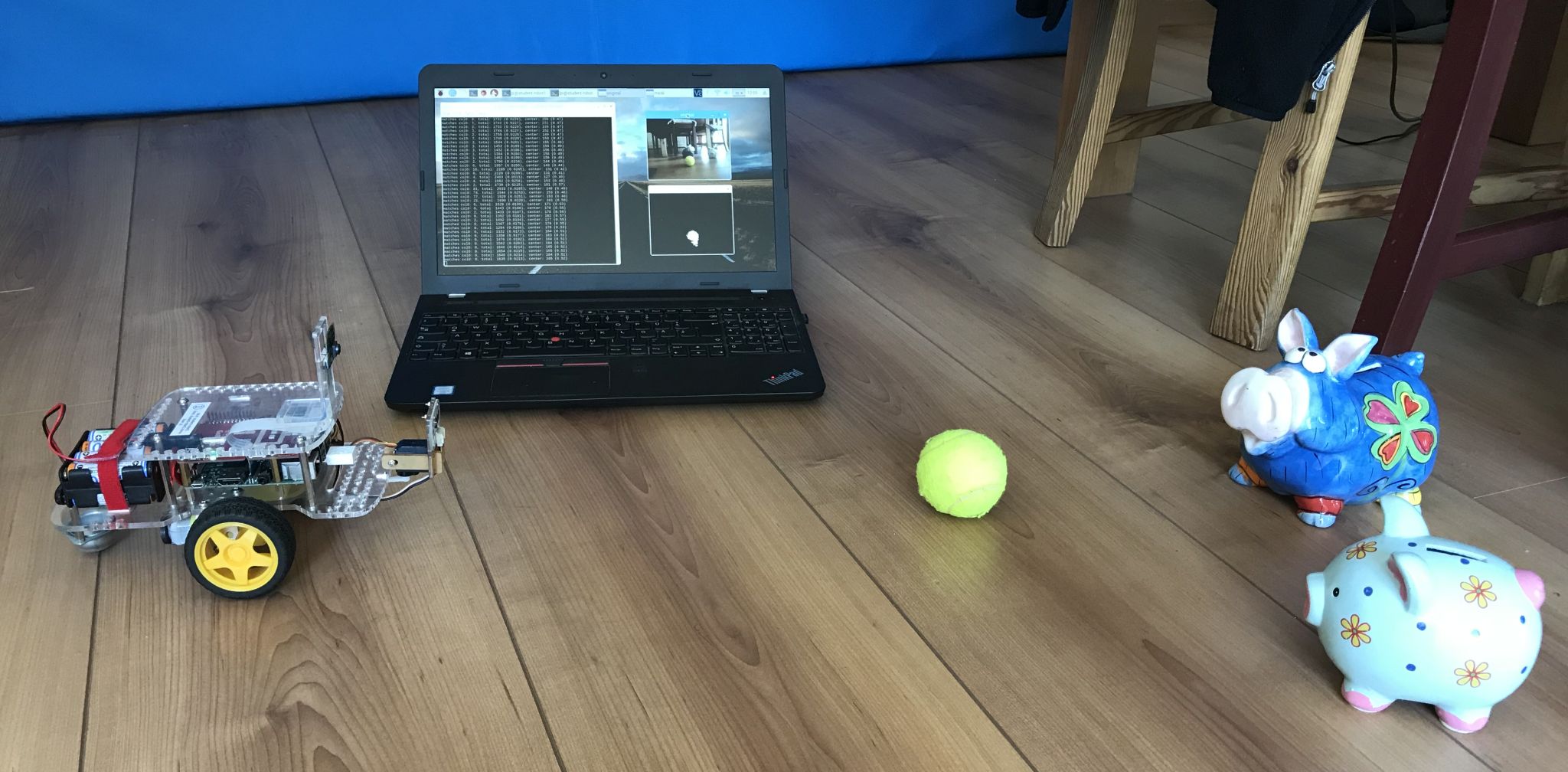
Ein Objekt, z.B. Tennisball, soll aufgrund seiner Farbe erkannt werden. Der Roboter passt seine Blickrichtung zum Objekt hin an. Er folgt dem Objekt.
Lösungsidee
Mit der Kamera werden ständig Bilder aufnommen. Mit OpenCV wird nach den Farbwerten des gesuchten Objekts gefiltert. Das Objekt wird dort vermutet, wo es besonders viele Bildpunkte mit passender Farbe gibt. In diese Richtung dreht sich der Roboter.
Lösungsbeispiel
import time
from pivideocapture import PiVideoCapture
import cv2
import numpy as np
from easygopigo3 import EasyGoPiGo3
with PiVideoCapture(resolution=(320,240), framerate=10) as vc:
print("camera resolution: {}".format(vc.camera_resolution()))
print("camera framerate : {}".format(vc.camera_framerate()))
egpg3 = EasyGoPiGo3()
try:
# move distance sensor straight (just to look nice)
egpg3.init_servo(port = "SERVO1").reset_servo()
print("Press Ctrl-C to stop")
try:
while True:
original = vc.read()
hsv = cv2.cvtColor(original, cv2.COLOR_BGR2HSV)
#print("hsv: {0[0]} {0[1]} {0[2]}".format(hsv[0,0]))
mask = cv2.inRange(hsv, np.array([20,100,70]), np.array([40,255,255]))
cv2.imshow('original', original)
#cv2.imshow('hsv', hsv)
cv2.imshow('mask', mask)
cv2.waitKey(1)
# each mask element contains the values 0 or 255
# sum up matching pixels per column
match_distribution = mask.sum(axis=0) // 255
total_matches = match_distribution.sum()
matches = total_matches / mask.size
if matches > 0.002:
sum = 0
for i in range(match_distribution.size):
sum += i * match_distribution[i]
average = sum // total_matches
match_center = average / match_distribution.size
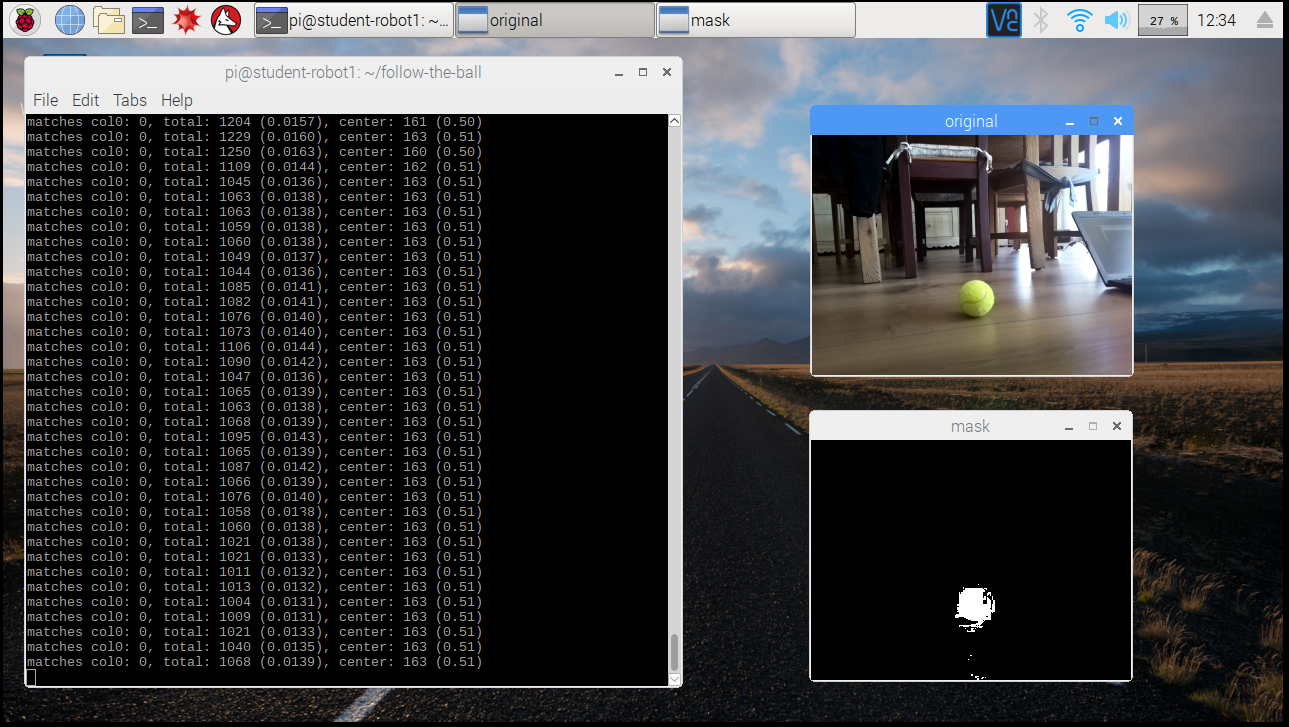
print("matches col0: {}, total: {} ({:.4f}), center: {} ({:.2f})". \
format(match_distribution[0], total_matches, matches, average, match_center))
if match_center < 0.45:
egpg3.set_speed(egpg3.DEFAULT_SPEED * ((0.5 - match_center) * 1.5))
egpg3.spin_left()
elif match_center < 0.55:
egpg3.stop()
else:
egpg3.set_speed(egpg3.DEFAULT_SPEED * ((match_center - 0.5) * 1.5))
egpg3.spin_right()
else:
print("matches col0: {}, total: {} ({:.4f})". \
format(match_distribution[0], total_matches, matches))
egpg3.stop()
except KeyboardInterrupt:
pass
finally:
egpg3.reset_all()
print("elasped time: {:.2f} secs".format(vc.elapsed_time()))
print("capture rate: {:.2f} fps".format(vc.capture_framerate()))
print("drop rate : {:.2f} fps".format(vc.drop_framerate()))
Rechts oben das Originalbild von der Kamera. Das untere Bild zeigt Stellen mit grünlichen Farben weiss an. Dort wird der Ball vermutet.
Filtern der Kamerabilder nach grünlichen Farben:

Der Roboter bewegt sich in die Richtung mit den meisten passenden Farben:
Copyright 2018 Marko Kimpel
Licensed under the GNU General Public License version 3, or (at your option) any later version.